Una de las asignaturas pendientes que tenía era aprender a manejar un programa de CAD para poder diseñar mis piezas e imprimirlas en la impresora 3D. Así que me puse manos a la obra con los Tutoriales de Obijuan y aprendí a moverme con FreeCAD.
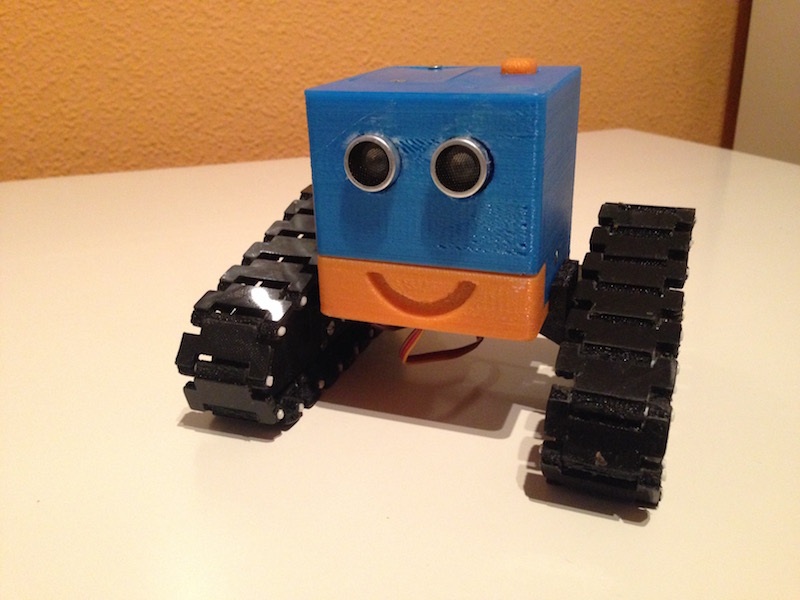
Lo primero que quería diseñar era un robot pequeño y manejable, orientado a que pudiera jugar también con él mi hijo pequeño. Las características mínimas que tenía en mente para este objetivo eran:
Pequeñas dimensiones, manejable con una mano
Diseño básico y resistente
Que toda la electrónica estuviera contenida dentro del robot, sin cables ni artilugios por fuera. Vamos, que pareciera un juguete
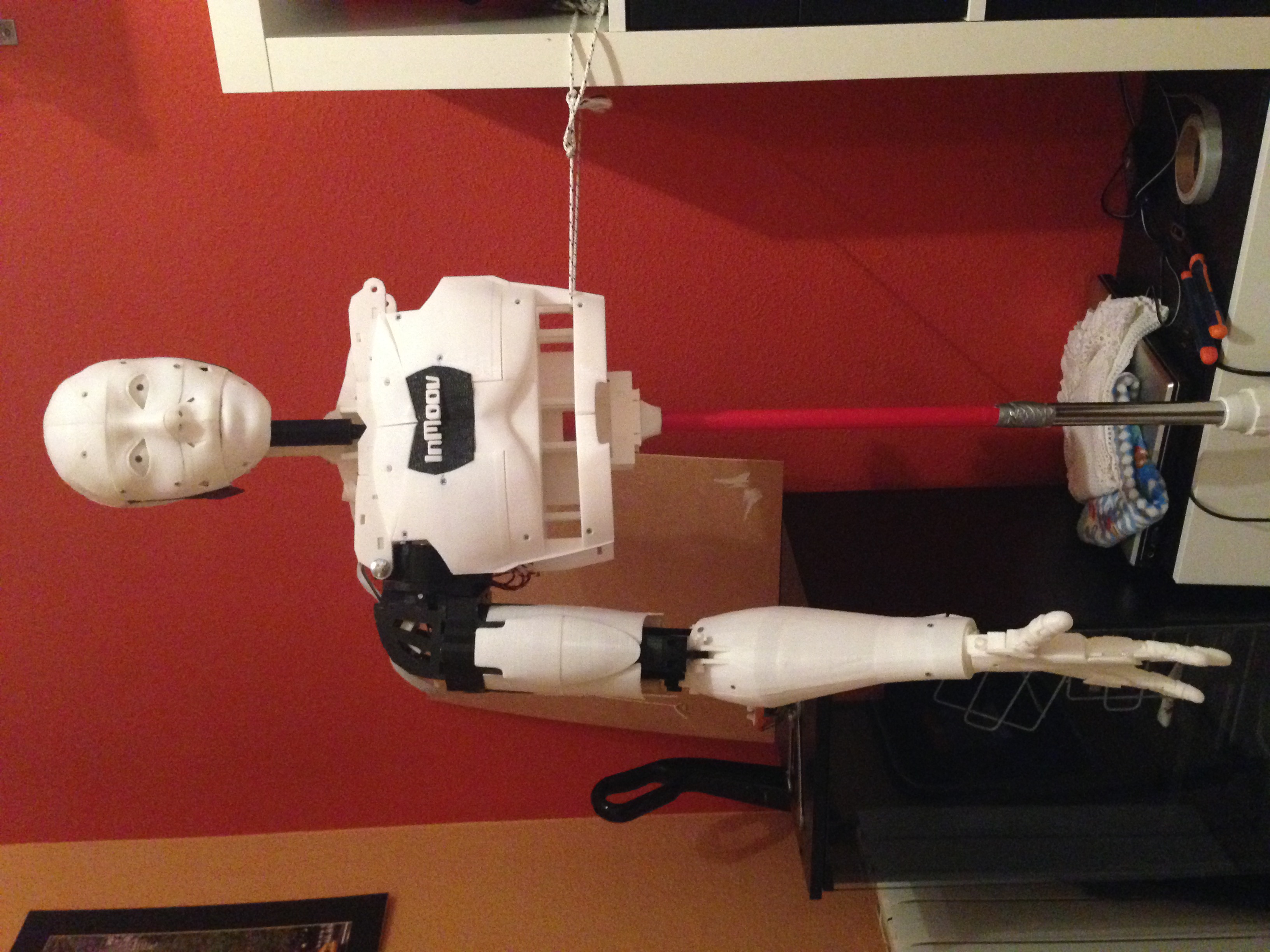
Hace ya casi un año que comencé a montarme este robot. Cada vez que tengo algo de tiempo pongo la impresora a trabajar y voy avanzando en el montaje. Ya esta lista la cabeza, el pecho, el brazo derecho y parte del izquierdo.
Como pensar es gratis y te permite hacer otras cosas al mismo tiempo, llevo algún tiempo dándole vueltas a la cabeza a programarme yo un cerebro para el robot, en vez de utilizar MyRobotLab como hasta ahora. Este verano, con algo más de tiempo libre, decidí poner en marcha todas aquellas ideas que me rondaban la cabeza. El principal motivo de programarme yo un cerebro es el tema del reconocimiento de voz, ya que MyRobotLab usa Sphinx y es complicado hacer que te reconozca hablando en Español (ya esta en desarrollo una nueva versión que mejora en este aspecto). También me parecía una aplicación demasiado genérica, y quería empezar a montarme un cerebro que, en un futuro fuera una aplicación que out-of-the-box permitiera gestionar el InMoov sin que el usuario tuviera muchos conocimientos de informática. Y porqué no, también tenía ganas de programar un rato. 🙂
Tengo que reconocer que lo que me dio el empujoncito para comprarme la impresora 3D fue ver este proyecto llamado InMoov. Desde siempre me ha gustado la robótica e InMoov es un humanoide creado por un diseñador francés que puedes imprimir totalmente en una impresora 3D así que fue una excusa perfecta para hacerme con ella. Las piezas están diseñadas para ser impresas en una cama normal de 20x20x20cms. La electrónica es controlada por Arduinos y el movimiento se logra mediante servos RC. Vamos, todos materiales que podemos encontrar en nuestro taller 🙂
El gran problema de un proyecto de este tipo es la cantidad de horas que son necesarias para llevar a cabo la impresión completa. No tengo claro cuantas horas puede llevar imprimir el robot completo, pero seguramente más de 500 horas. Pero en cualquier caso me parece un proyecto espectacular y superadictivo; cada vez que llego a casa del trabajo pongo la impresora a trabajar y el fin de semana o cuando tengo hueco, a montar!
El control del robot se puede hacer con un módulo que el creador ha programado para la herramienta MyRobotLab. La verdad es que no es una herramienta que esté muy depurada, pero para ir probando el robot es genial pues te permite muchas funcionalidades programandolo en Python. Seguramente cuando termine el montaje desarrolle un Software en Java para el control del robot, pero por ahora MyRobotLab me funciona perfectamente.
Os dejo un video de la mano, la primera parte que he impreso del robot, con sus 5 servos para mover cada uno de los dedos y otro servo más para la muñeca; y todo ello conectado a un Arduino Mega y controlado desde un Mac con MyRobotLab ¡Poner a punto vuestras impresoras, makers!